柔性驱动分枝振动式油茶果采收机
项目概述
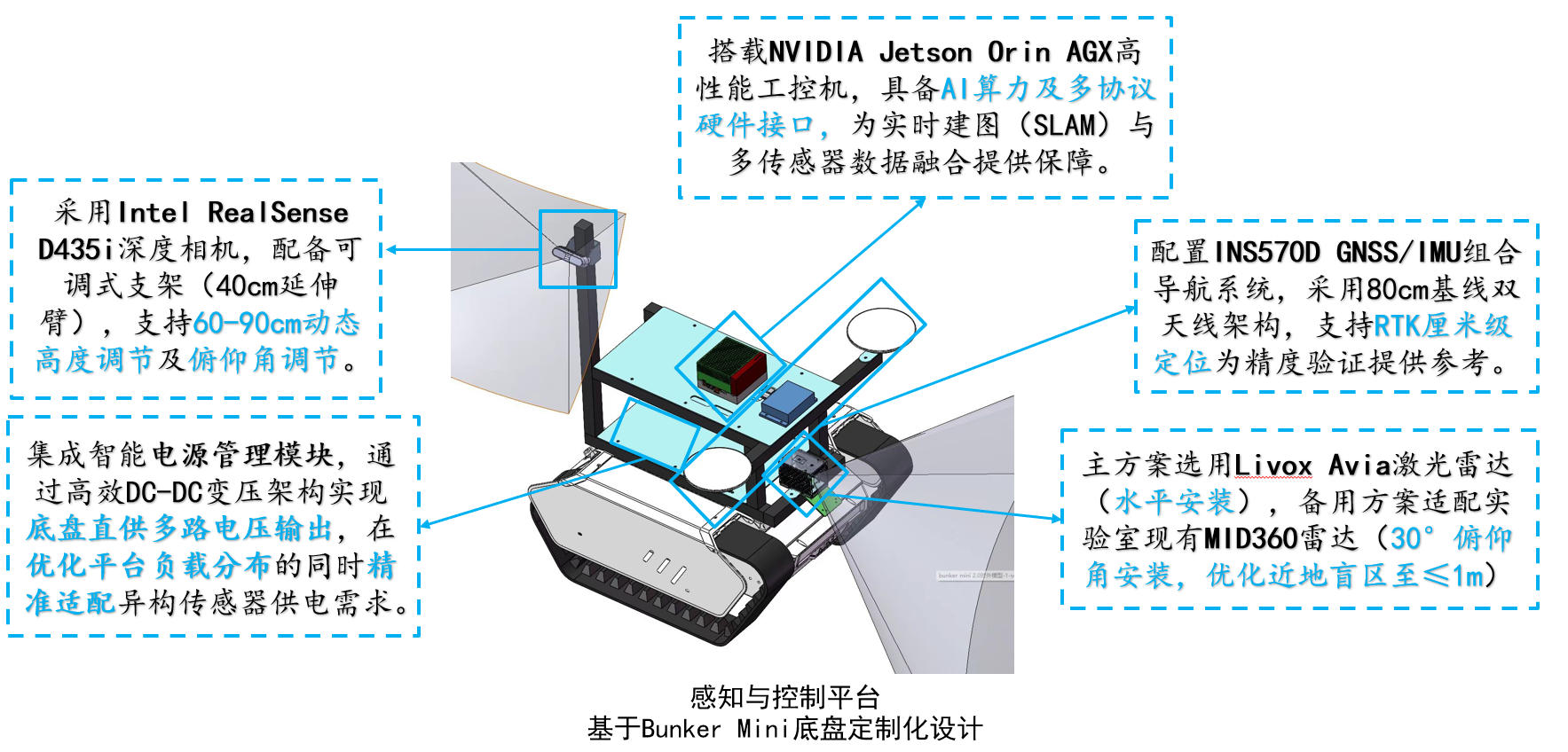
针对丘陵油茶园复杂非结构化环境,研发基于多源传感器自主导航与机械臂自动采摘的智能油茶果采收机器人。
单木点云实例分割
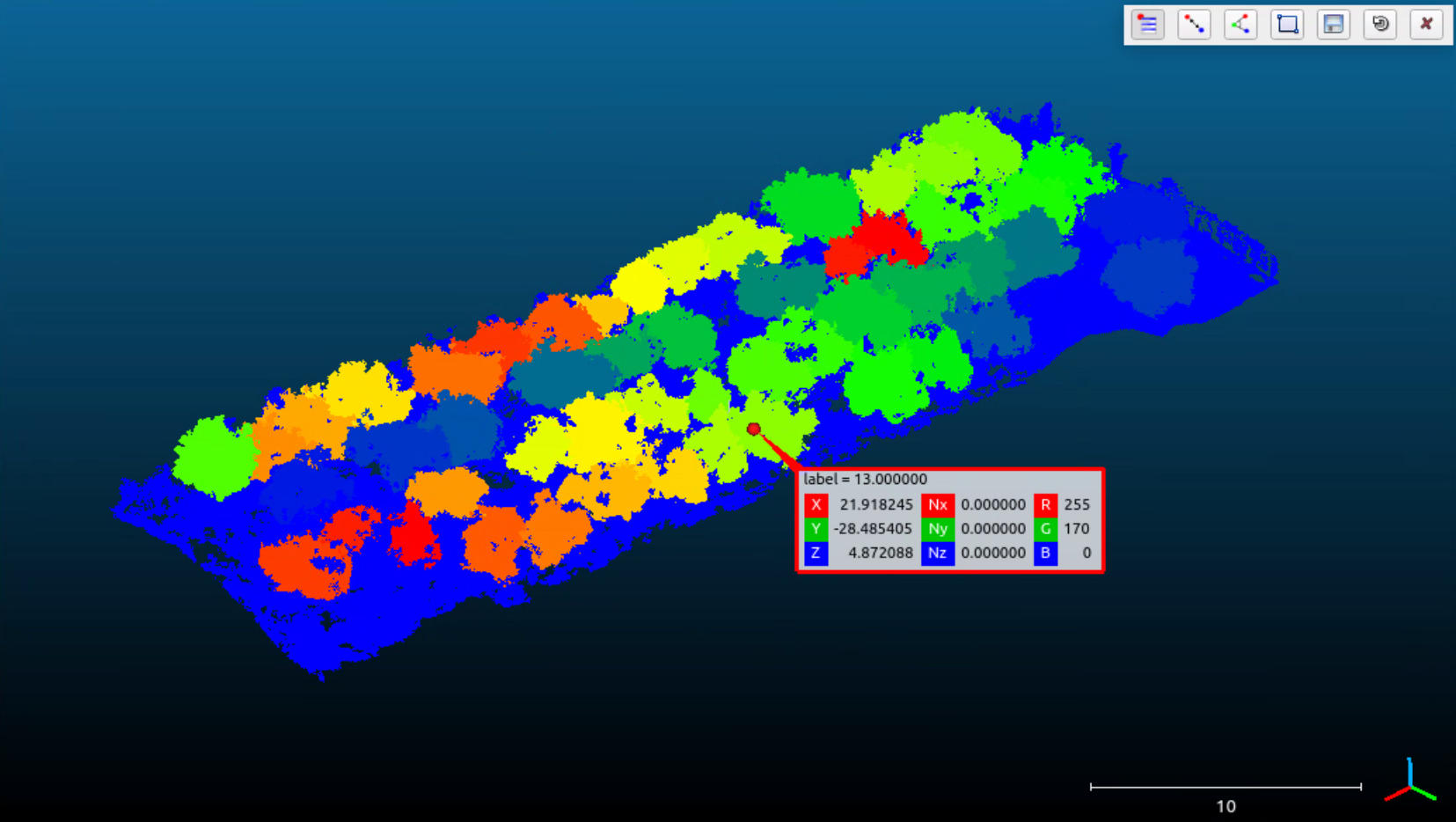
传统几何分割算法极度依赖精确的地面提取,在起伏复杂的丘陵果园中极易失效, 且难以处理交错连结的树冠。为此开发数据驱动的 单木点云实例分割模块, 为下游路径规划与机械臂采摘提供决策级语义先验:
三阶段pipeline: 骨干网络为基于稀疏卷积的 U-Net 架构; 语义头输出二类语义信息,偏移头输出每个树点到对应树基的偏移向量; 对原始点云进行偏移,聚类后得到区分显著的单木分割实例。 在实地采集的果园点云中手动分割标注,构建数据集(约200棵果树); 针对油茶果高度较低、种植密集、树冠交叉显著等特征调整空间参数,并使用预训练权重做迁移学习。
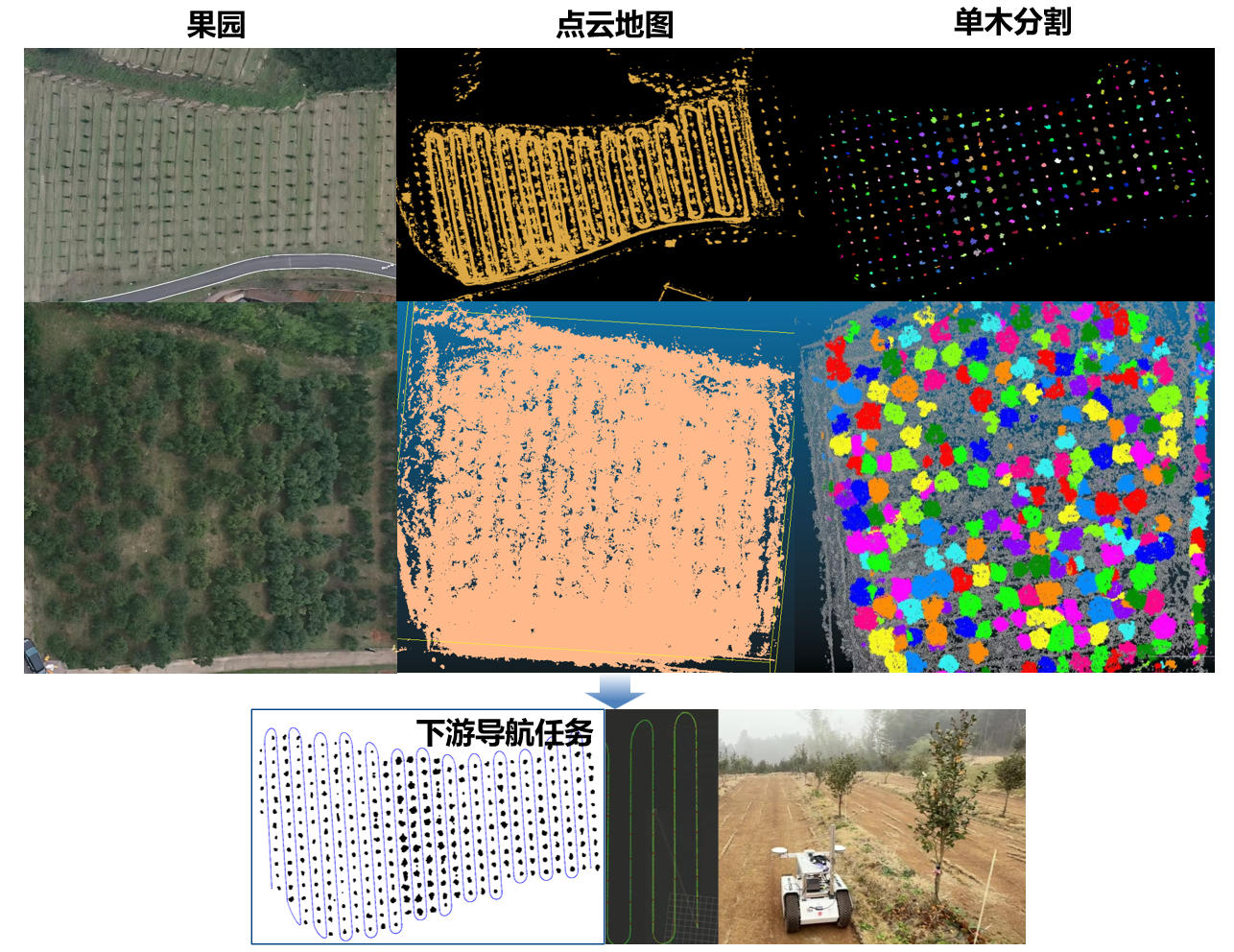
基于FAST-LIO2的RTK融合优化
面向丘陵油茶园复杂非结构化环境,部署并优化FAST-LIO2,构建果园大尺度点云地图。 同时开发基于FAST-LIO2的重定位算法,通过融合RTK位姿先验,提升动态环境下的定位精度。
在原算法LiDAR和IMU紧耦合ESKF的基础上,融合RTK误差状态,在观测更新阶段增加RTK的位置观测项。 RTK提供绝对位置约束防止可以防止激光雷达退化时的定位漂移,大大提高建图精度和鲁棒性; 在受到树木遮挡等RTK拒止情况时,slam算法退化到默认的误差状态更新策略,也能保持较高精度。
使用FAST-LIO2高频里程计对齐本地scan和里程计,用两层 Point-to-Plane ICP进行低频配准,将里程计对齐到全局地图。