德赛西威物流机器人 Multi-agent SLAM 建图定位系统
项目目标 / 功能需求
末端配送往往占据整个物流成本的 28% 至 50% 以上,面临着道路环境复杂、目标地点数量多、辐射广等独特挑战, 始终是物流链路中效率最低、成本最高的环节。 本项目旨在研究一套 Multi-agent SLAM 建图定位方案, 解决末端配送场景下人力资源匮乏、人力物力成本高、配送效率低等实际问题。
- 负责业务
- 开发定制化 Data Loader 模块与对应算法接口 ,实现离散异构数据的精准时序同步;
- 开发多传感器融合的语义 SLAM 算法,结合跨模态语义先验实现高鲁棒性SLAM前端;
- 开发大规模局部点云地图融合算法,实现多机器人异步建图的云端高精度拼接与全局一致性对齐。
依赖条件
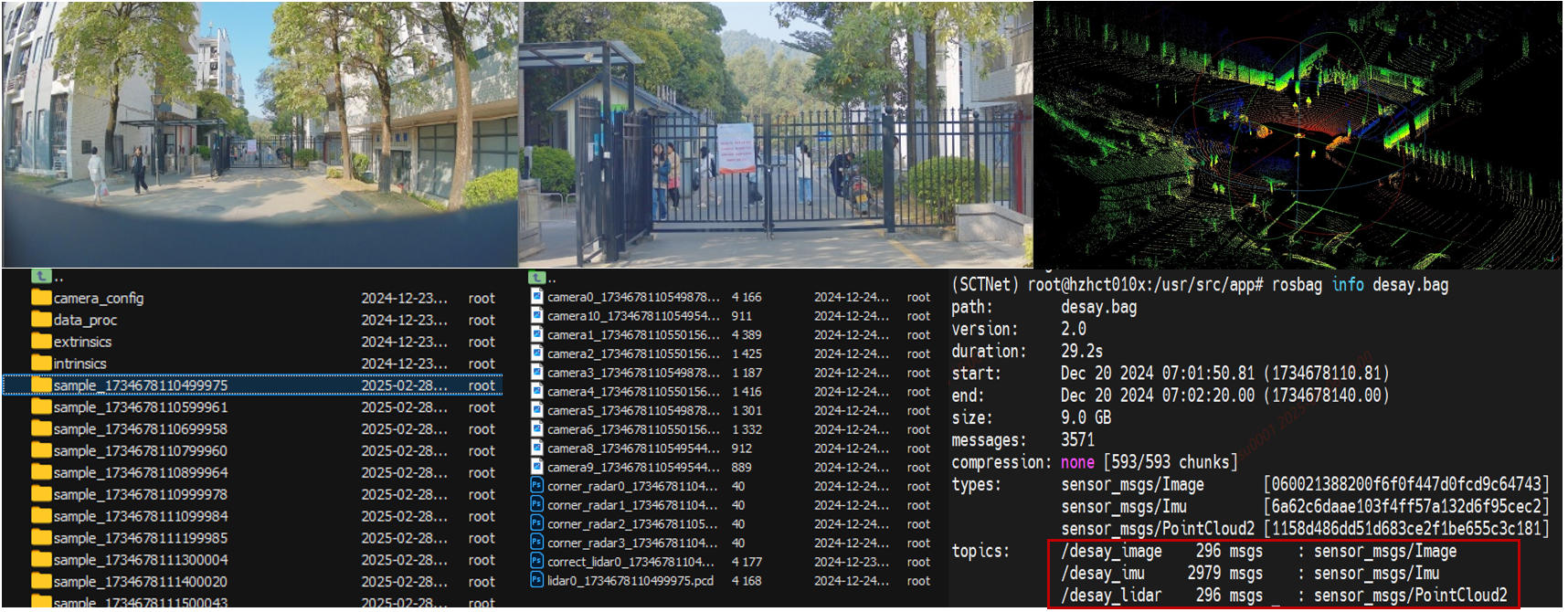
- 建图机器人(高配置高算力): 禾赛 XT32 / XT128 + 双目前视长焦/广角 + 4×周视 + 后视 + RTK + IMU
- 送货机器人(低配置低算力): 视觉传感器 + RTK + IMU
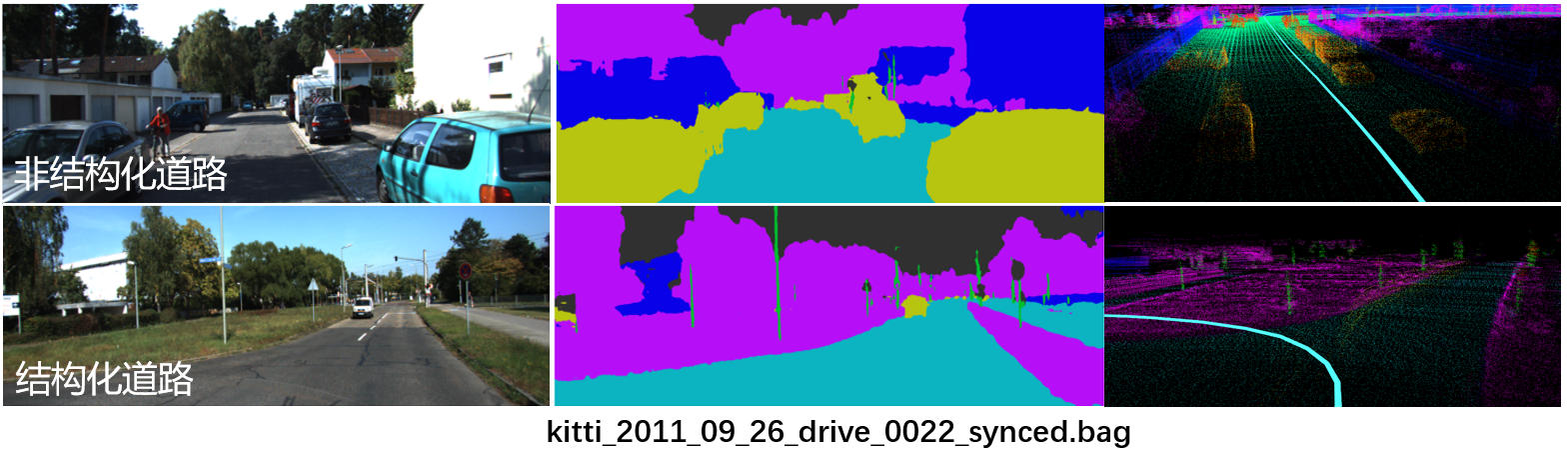
- 数据集: KITTI 公开数据集、德赛西威数据集(结构化道路 + 非结构化场景)
数据集展示
针对采集车的离散异构数据序列,通过重构 SLAM 前端数据输入接口,开发定制化的 Data Loader 模块。 该模块直接解析底层文件完成时间戳软对齐与无效帧过滤 ,使算法前端直接读取原始数据流,避免 ROS 中间件的通信与序列化开销,大幅提升离线测试效率。

多传感器融合语义 SLAM 算法
优化Frame-to-Frame匹配机制,引入点云语义先验辅助线面残差计算, 大幅降低无效特征检索,提升前端计算效率;同时提取语义路面构建全局绝对地面约束因子(roll、pitch和z轴强约束),有效抑制物流场景下长距离直行的 Z 轴漂移。
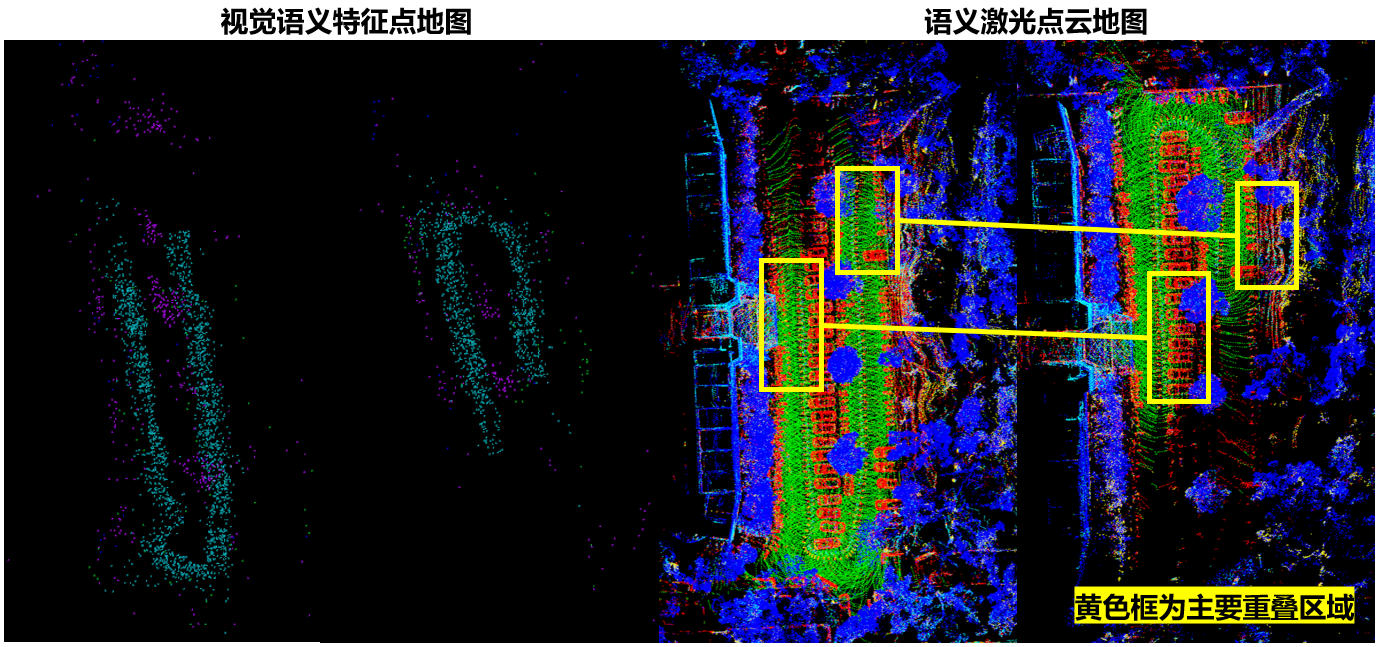
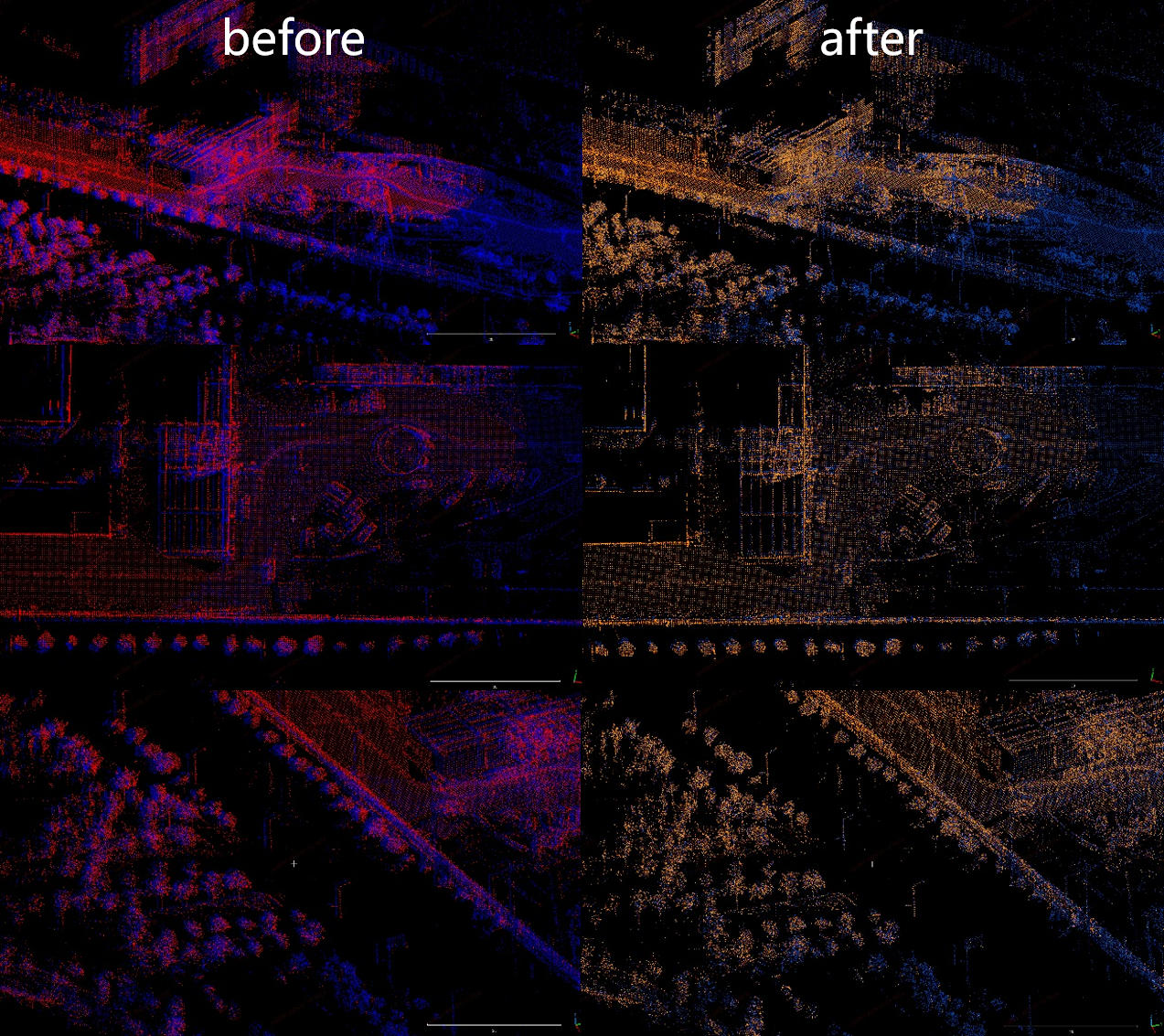
通过 RangeNet++ 和 DeepLabV3Plus-MobileNet 框架, 分别得到单帧激光点云语义信息和图像帧语义掩码。通过匹配视觉特征和深度点反推出特征点的深度信息, 同时融合二者语义,得到带有语义信息的视觉特征点云。 该方案在保留关键场景语义的同时,极大地压缩了地图体积,完美适配低算力送货机器人的云端下发与重定位需求。

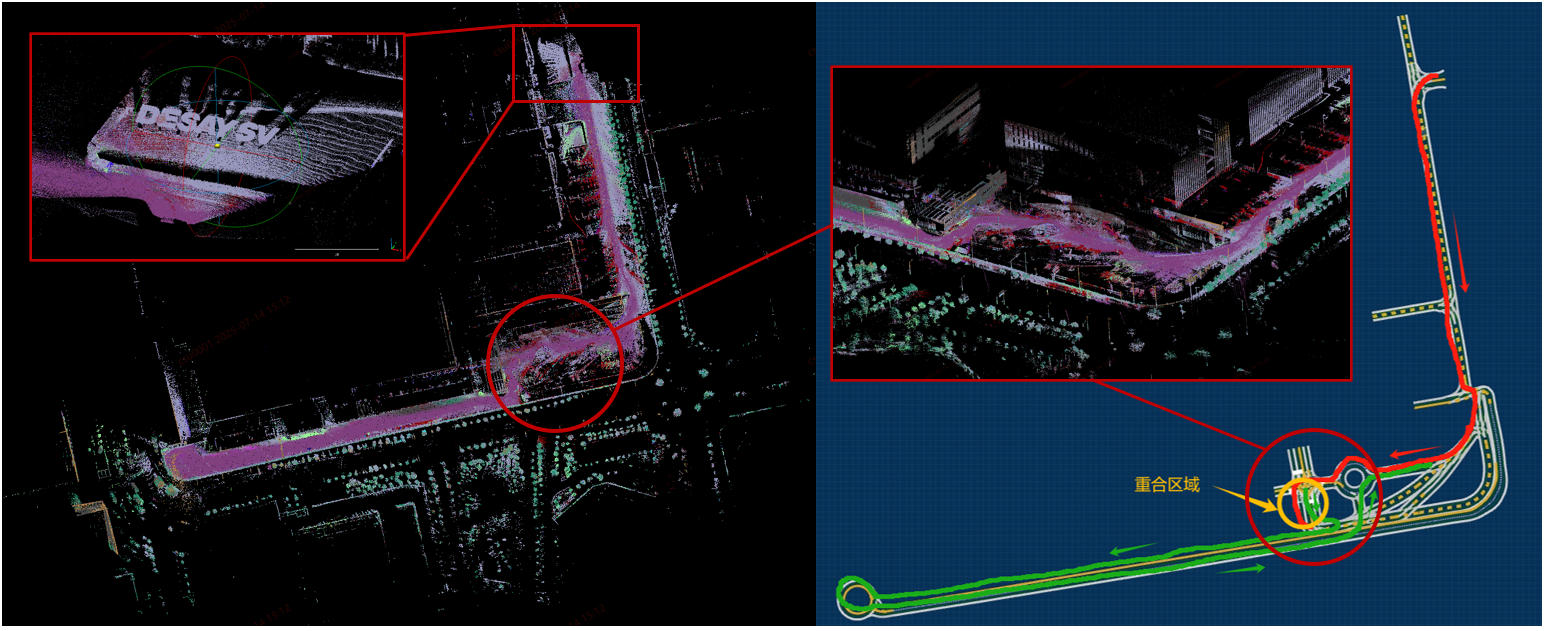
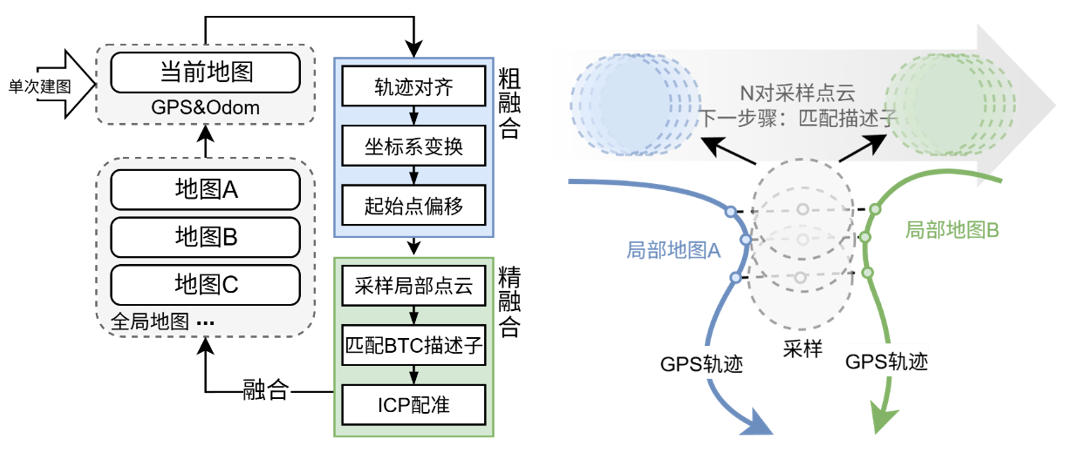
地图融合算法
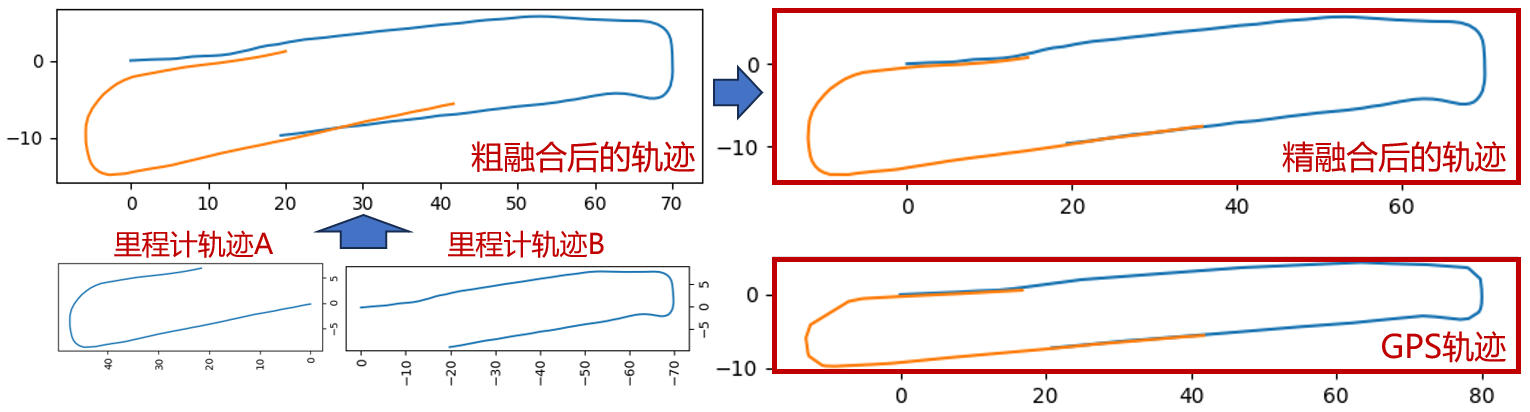
在物流机器人的应用场景中,多个建图机器人分别作业,构建多个独立的局部点云地图, 需要将它们融合为一个精准的、全局一致的地图。 本融合算法包含两个主要步骤:
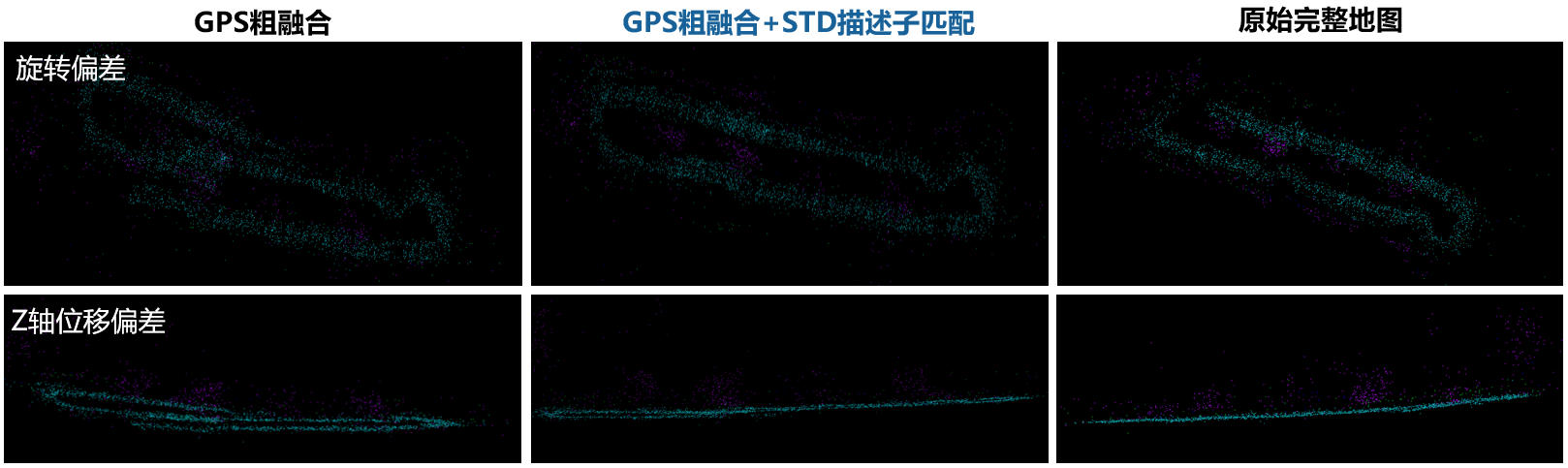
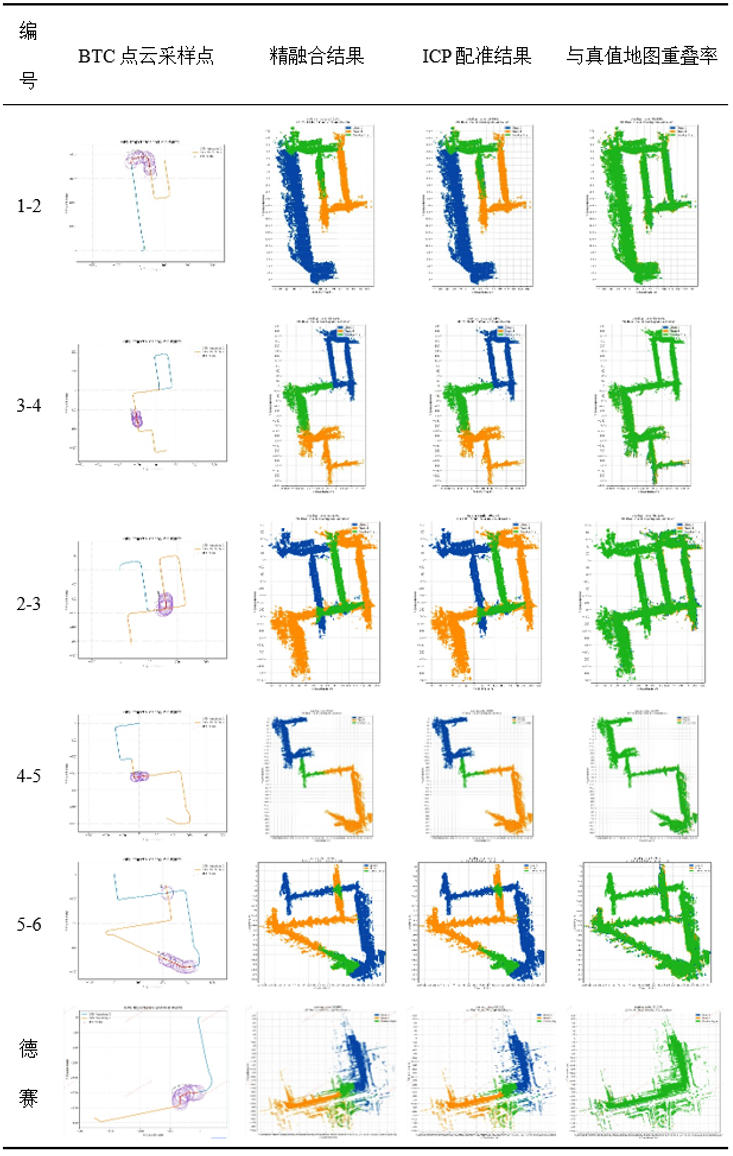
- 基于 GPS 和里程计的粗融合;
- 基于 BTC 描述子和 ICP 配准的精融合。
本算法利用建图产生的 GPS、里程计等信息, 结合局部地图之间有限重合区域的点云特征, 采用由粗到精的融合策略, 将局部地图融合为完整的全局地图, 为送货机器人的重定位提供精准有效的先验信息。
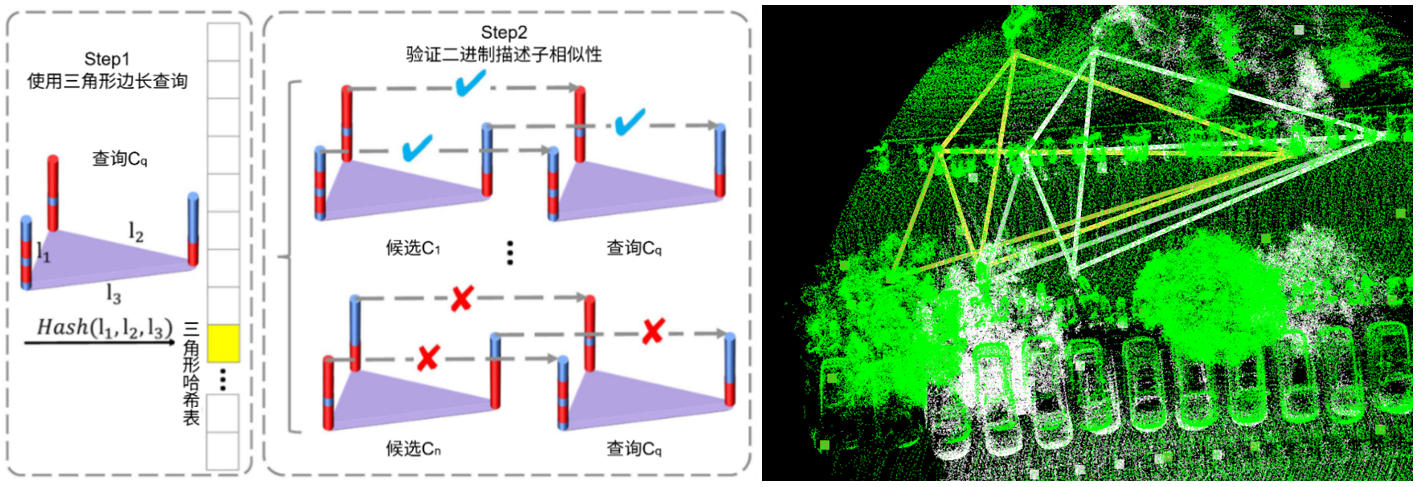
BTC 描述子由三角形描述子和二进制描述子组成。三角形描述子封装了关键点之间的几何关系,包含场景的全局特征。 三角形的形状对于刚体变换具有不变性,且可由其边长唯一确定—— 若三边长各不相同,三角形顶点的对应关系也可以唯一确定。 这些特性使其非常适合用来表示由一组关键点形成的空间特征。 二进制描述子由关键点的三维位置和二进制字符串组成, 分别存储了关键点的位置信息和其上方点的垂直分布信息, 编码了三角形描述符中每个三角形顶点的局部几何信息。 在本项目涉及的大型复杂场景中, 它为提取出的关键点提供了紧凑而有效的局部几何信息表示, 可以增强三角形描述子的描述性和区分度。